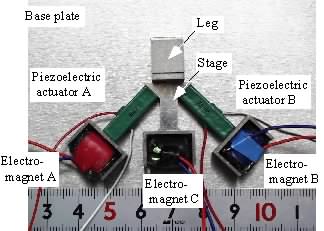
試作した3自由度移動機構の構造を図6に示す。伸縮素子には積層型圧電素子、摩擦調整機構には電磁石を用いた。全体の寸法は38×66×16mm、質量は38gである。
鉄心の両端が炭素鋼板(表面粗さ4.29μmRz)上に接するように置き、5Vを印加して最大静止摩擦力を測定すると1.4Nであった。
|
| Fig. 6 Appearance of Seal device with 3 DOF which friction devices are arranged in line |
試作したL字形3自由度移動機構の外観を図7に示す。伸縮素子には積層型圧電素子、摩擦調整機構には電磁石を用いた。全体の寸法は63´63´16mm、質量は34gである。
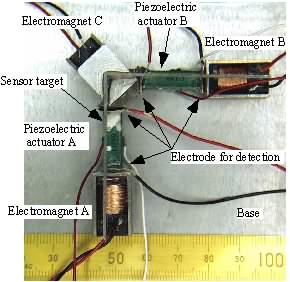 |
| Fig. 7 Appearance of L-shaped Seal device with 3 DOF |
圧電素子の寸法は5×5×20mmで、100V印加時に11.6μm伸びる。電磁石は市販のリレーを分解してそこにに内蔵されているコイルを用いた。鉄心はコの字形になっており、全体の寸法は9×10×14mmである。また、抵抗は910Ω、インダクタンスは3.1mHである。鉄心の両端が炭素鋼板(表面粗さ4.29μmRz)上に接するように置き、5Vを印加して最大静止摩擦力を測定すると1.4Nであった。
位置決めシステムの構成を図8に示す。印加電圧はパーソナルコンピュータを用いて発生させ、圧電素子駆動アンプを介して与えた。変位の測定には、渦電流式変位計(測定範囲1mm、分解能0.4μm)を用いた。3つのセンサ出力から電磁石CCの位置と回転量を計算する。
 |
| Fig. 8 Configuration of positioning system for L-shaped device |
圧電素子A、Bと電磁石A、Bへの印加電圧パターンを図9に示す。印加電圧を0Vにしても残留磁気のため吸着力が0とならなかった。そのため、一直線上に摩擦機構を配置した機構では「オフ」時には実験的に求めた-0.25Vを印加することにした。電磁石Cには常に2Vを印加した。圧電素子を矩形波で駆動すると、電磁石の質量により衝撃的な慣性力が発生し動きが乱される。したがって、印加電圧は変化する時間が140msの放物線状とした。これらの駆動波形はパーソナルコンピュータを用いて生成し、駆動アンプを通して印加した。
 |
| Fig. 9 Applied voltage to piezoelectric actuator and electromagnet |
L字型機構では,電磁石CA、CBへは、オン電圧6V、オフ電圧-0.2Vの矩形波を入力した。電磁石CCへは1Vの一定電圧を印加した。
変位の測定には渦電流式変位計(測定範囲1mm、分解能0.4μm)を用いた。
Last modified on 07/05/2003 at 13:15:27 by Katsushi Furutani