豊田工大Release
【学生受賞】博士後期課程2年 武次広夢さんが「第245回 情報処理学会 コンピュータビジョンとイメージメディア研究会」において奨励賞を受賞
2026.05.14
「第245回 情報処理学会 コンピュータビジョンとイメージメディア研究会」において奨励賞を受賞
- 受賞者
豊田工業大学 大学院工学研究科 博士後期課程 情報援用工学専攻 2年 武次広夢さん(知能情報メディア研究室)
- 受賞名
奨励賞
- 発表タイトル
物理シミュレーションに基づく大規模事前学習による物理的妥当性を備えた歩行者軌跡予測
- 受賞日
2026年3月26日
賞の概要
CVIM研究会に申し込んで行われた各回の研究発表(ただし、卒論セッションとD論セッションにおける研究発表を除く)のうち、口頭発表を行い、かつ、ポスター形式の発表を行った個人を対象とする。各回の研究会において、CVIM 研究会参加者による投票に基づいて、原則、1件を選定する。
研究概要
人軌跡予測は、シーン内の人物の過去数秒間にわたる位置などの観測をもとに、将来時刻における人の軌跡を予測する技術で、自動運転やソーシャルロボットなどに応用されています。本研究ではその中でも、歩行者の急な飛び出しなど、わずかな観測しか得られない場合に特に有効な人軌跡予測手法を提案しました。
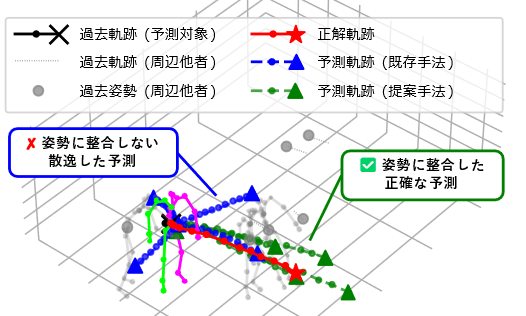
十分な観測が得られず、人の位置だけでは予測が困難な場合において、人姿勢を予測に活用することが有効であると知られています。姿勢を見れば、位置だけでは分からない顔や体の向き、歩幅などの有用な情報が得られるためです。しかし図1に示す通り、既存手法(青色)は姿勢を適切に活用できておらず、姿勢に整合しない散逸した予測軌跡を出力してしまいがちです。私たちはこの原因として、観測姿勢と予測軌跡の物理的な関係を学習するだけの実世界データが不足している点に着目しました。
この問題に対して本研究では、物理シミュレータ内のヒューマノイドによる歩行生成を活用し、人軌跡予測を学習する手法を提案しています。物理シミュレータ内で正確に計測可能な観測姿勢と、物理法則に従って実際に生成された歩行軌跡のペアを用いることで、実世界データを上回る大規模なシミュレーションデータでの学習を実現しました。実験では、提案手法によって姿勢に整合した正確な予測(図1、緑色)が可能となり、実世界データセットにおけるわずか0.4秒の観測からの軌跡予測において、既存手法に比べて50%の誤差低減に成功しました。
受賞コメント
この度はこのような栄誉ある賞をいただき大変嬉しく思います。日頃よりご指導いただいている浮田先生や共同研究者の延原先生(京都工芸繊維大)をはじめ、支えてくださっている皆様に心より感謝いたします。これを励みにより一層研究に邁進し、人と機械が共生する未来の実現に貢献していく所存です。
謝辞:本研究はJSPS 科研費(特別研究員奨励費、課題番号25KJ2195)の助成を受けたものです。