Gaussian Process Motion Graph Models
for Smooth Transitions among Multiple Actions
Norimichi Ukita
Takeo Kanade
Abstract
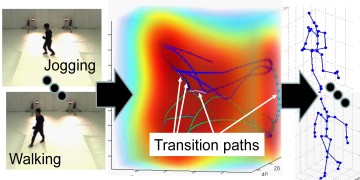
We propose a unified model for human motion prior
with multiple actions. Our model is generated from sample pose
sequences of the multiple actions, each of which is recorded from real
human motion. The sample sequences are connected to each other by
synthesizing a variety of possible transitions among the different
actions. For kinematically-realistic transitions, our model integrates
nonlinear probabilistic latent modeling of the samples and
interpolation-based synthesis of the transition paths. While naive
interpolation makes unexpected poses, our model rejects them 1) by
searching for smooth and short transition paths by employing the good
properties of the observation and latent spaces and 2) by avoiding
using samples that unexpectedly synthesize the non-smooth
interpolation. The effectiveness of the model is demonstrated with
real data and its application to human pose tracking.
Citation
- Norimichi Ukita and Takeo Kanade,
Gaussian Process Motion Graph Models
for Smooth Transitions among Multiple Actions,
Computer Vision and Image Understanding,
Volume 116, Issue 4, pp.500-509, 2012.
(Impact factor 2012 = 1.232)