Simultaneous Particle Tracking in Multi-Action Motion Models
with Synthesized Paths
Norimichi Ukita
Abstract
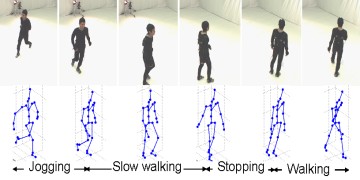
This paper proposes the human motion models of
multiple actions for 3D pose tracking. A training pose sequence of
each action, such as walking and jogging, is separately recorded by
a motion capture system and modeled independently. This independent
modeling of action-specific motions allows us 1) to optimize each
model in accordance with only its respective motion and 2) to
improve the scalability of the models. Unlike existing approaches
with similar motion models (e.g. switching dynamical models), our
pose tracking method uses the multiple models simultaneously for
coping with ambiguous motions. For robust tracking with the multiple
models, particle filtering is employed so that particles are
distributed simultaneously in the models. Efficient use of the
particles can be achieved by locating many particles in the model
corresponding to an action that is currently observed. For
transferring the particles among the models in quick response to
changes in the action, transition paths are synthesized between the
different models in order to virtually prepare inter-action motions.
Experimental results demonstrate that the proposed models improve
accuracy in pose tracking.
Citation
- Norimichi Ukita,
Simultaneous Particle Tracking in Multi-Action Motion Models with Synthesized Paths,
Image and Vision Computing,
Vol.31, No.6-7, pp.448-459, 2013.
(Impact factor 2013 = 1.581)