豊田工業大学 研究センタースマートビークル研究センター

2010年設立 センター長:渡邉保真
設計工学研究室
准教授 小林 正和
研究テーマ
- 生体信号の測定に基づく製品の快適性評価と最適設計
- 力覚提示装置を用いたUAVの遠隔操作技術
- 深層学習を用いた顧客の感性評価に基づく製品設計
- 機械学習を用いた効率的な構造最適化
主な研究内容
①生体信号の測定に基づく製品の快適性評価と最適設計
製品使用時のユーザーの快適性は椅子やエアコン,自動車など,多くの製品において重要な評価項目の一つである.快適性の評価には多くの場合,アンケート等の主観評価が用いられる.しかしながら,アンケート等の主観評価には,快適性以外の主観が入り込む余地があり,また,精度の高い定量評価が難しいという問題がある.
そこで本研究では,主観によらない客観的な評価の指標として脳波や心電といった生体信号に注目し,生体信号の測定に基づいて製品使用時のユーザーの快適性を評価する方法と,快適性を目的関数として,製品の設計やセッティング最適化する方法の研究を行っている.
②力覚提示装置を用いたUAVの遠隔操作技術
マルチコプター型UAV(Unmanned Aerial Vehicle)はホバリング能力と無指向性の飛行能力による高い運動能力を持ち、幅広い活躍が期待されている。災害現場の捜索救難活動のように、人による確認、判断が必要とされる活動では操縦者がUAVを遠隔操作する必要があるが、障害物の多い環境におけるUAVの遠隔操作は難しい。
本研究では、図1に示す力覚提示装置Phantom Omni(以降Phantomと呼称)を用いたUAVの操作システムを構築した。提案システムの概要を図2に示す。提案システムでは、操縦者はPhantomを用いてUAVの操作指示を行うが、同時に障害物までの距離に基づいた操作反力を障害物とは逆向きにPhantomから受ける。操作反力を障害物に近づくほど大きくなるように設定することで、UAVを障害物に近づける方向に移動させにくくなるため、操縦者はUAVと障害物の距離関係を視覚以外の情報で認識できるようになり、障害物の多い環境においてUAVを安全に飛行させることができる。

図1:力覚提示装置
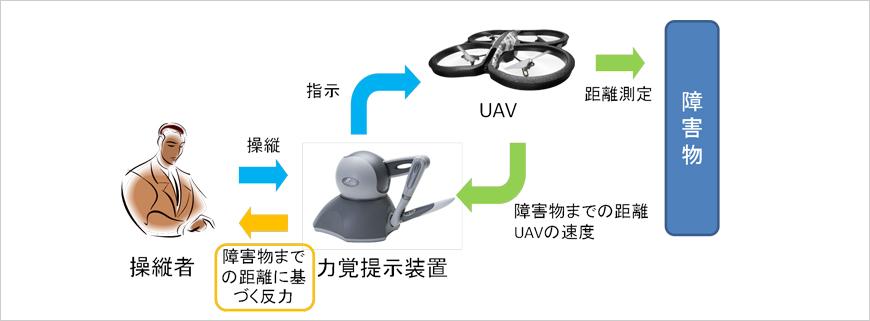
図2:提案システムの概略